
半机械昆虫飞行控制技术与控制系统
一、成果简介
本成果提出了“构建虚拟视觉信号”的半机械昆虫飞行控制技术,属于昆虫行为调控与半机械昆虫构建领域。该技术通过向昆虫视叶施加模拟视叶场电位的脉冲信号,调节视叶电位活动,使昆虫产生视觉假象,从而做出行为响应。该技术成功实现了对于昆虫飞行启停与转向的控制,成功率达到89%。此外,本发明构建了具备无线通讯功能与变刺激参数输出特性的昆虫运动控制系统。该系统体积仅为10*4.5*1 mm,重量仅为143 mg,且具有一定柔性,体积与重量仅为国际同类先进产品的20%左右。该系统已成功用于半机械蜜蜂与半机械蟑螂的构建,并实现了对其飞行、爬行等行为以及运动方向的调控,体现出良好的载体适应性与可推广性。
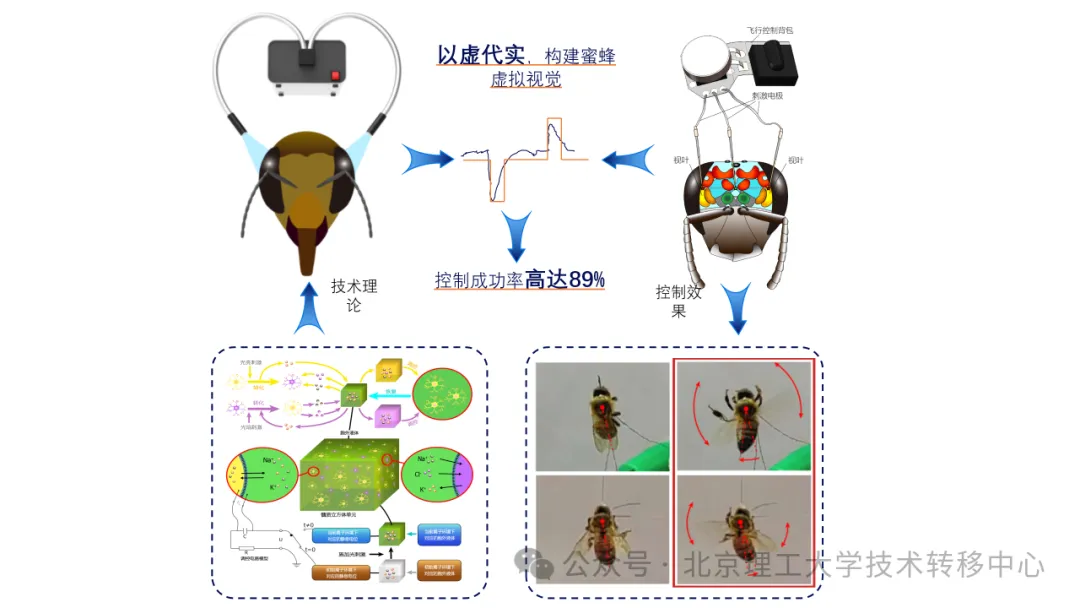
图1.“构建虚拟视觉信号”的半机械昆虫自主导航控制技术
二、应用领域
新一代智能装备领域
三、市场前景
本成果所属的半机械昆虫机器人在侦察、灾后救援、农业监测、生物保护等领域具有广泛应用前景。目前,基于该系统构建的半机械蟑螂已被多家企业成功应用于化学品泄漏检测,并累积获得500万元的经济效益。
在侦查领域,半机械昆虫机器人相比于常规侦查装置,脑控昆虫具有现有无人侦察装备无法媲美的隐蔽性和伪装性优势,不易引起犯罪嫌疑人的反侦察动作,提高侦察效率。预计每年的市场份额便可达到64亿元。
在灾后救援领域,目前在救援过程中一些环境的勘察等借助于现有的小型四旋翼无人机。预计到2024年,我国民用无人机市场份额可以达到2000亿人民币,市场份额巨大。但是在一些特殊环境状况下(如狭小空间等),这类无人机的适用性就受到了很大的限制。而半机械昆虫飞行器由于自身灵活性和适应性优势,可以替代人类进入更加狭小的空间中,协助救援人员更高效地的完成搜救任务。
在农业监测与生物保护领域,如自然生态圈野生动物保护与迁徙,当前的监测设备无法有效地布控,所以通过半机械昆虫等机器人可以实现动态化的监测,能够实时获得一线的数据,一方面可以用于科学研究,另一方面也用于对生态环境发展的一项重要评估。

图2. 半机械昆虫:(a)蜜蜂;(b)蟑螂
四、知识产权
1、成果由北京理工大学单独持有;
2、本成果已申请专利3项
五、合作方式
合作开发、技术服务和咨询等。
六、对接方式
(1)合作意向方联系北理工技术转移中心;
(2)北理工技术转移中心沟通了解意向方情况;
(3)会同成果完成团队与意向方共同研讨合作方案。
北京理工大学技术转移中心
电话:010-68914920
网址:ttc.bit.edu.cn
未经授权,请勿转载