

1
Deep Learning-based Target-To-User Association in
Integrated Sensing and Communication Systems
Lorenzo Cazzella, Graduate Student Member, IEEE, Marouan Mizmizi, Member, IEEE,
Dario Tagliaferri, Member, IEEE, Damiano Badini, Member, IEEE, Matteo Matteucci, Member, IEEE,
and Umberto Spagnolini, Senior Member, IEEE
Abstract—In Integrated Sensing and Communication (ISAC)
systems, matching the radar targets with communication user
equipments (UEs) is functional to several communication tasks,
such as proactive handover and beam prediction. In this paper,
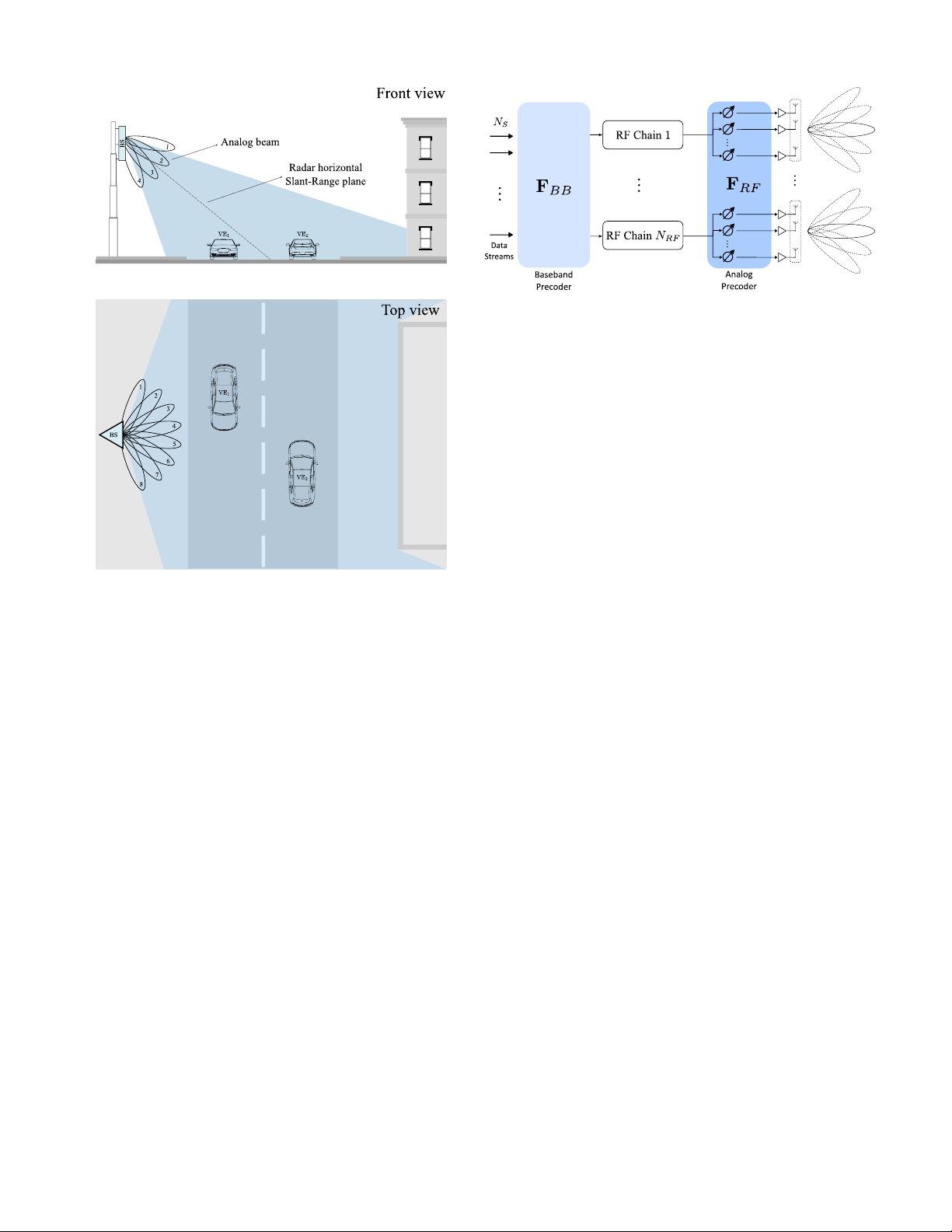
we consider a radar-assisted communication system where a
base station (BS) is equipped with a multiple-input-multiple-
output (MIMO) radar that has a double aim: (i) associate
vehicular radar targets to vehicular equipments (VEs) in the
communication beamspace and (ii) predict the beamforming
vector for each VE from radar data. The proposed target-to-user
(T2U) association consists of two stages. First, vehicular radar
targets are detected from range-angle images, and, for each, a
beamforming vector is estimated. Then, the inferred per-target
beamforming vectors are matched with the ones utilized at the BS
for communication to perform target-to-user (T2U) association.
Joint multi-target detection and beam inference is obtained by
modifying the you only look once (YOLO) model, which is
trained over simulated range-angle radar images. Simulation
results over different urban vehicular mobility scenarios show
that the proposed T2U method provides a probability of correct
association that increases with the size of the BS antenna array,
highlighting the respective increase of the separability of the VEs
in the beamspace. Moreover, we show that the modified YOLO
architecture can effectively perform both beam prediction and
radar target detection, with similar performance in mean average
precision on the latter over different antenna array sizes.
Index Terms—Radar-aided communications, Multi-target de-
tection, Deep Learning, Target-to-User association
I. INTRODUCTION
I
NTEGRATED sensing and communication (ISAC) are
poised to be a fundamental technology for the forthcoming
6G era [1]. This revolutionary concept combines advanced
wireless communication capabilities with pervasive sensing,
paving the way for unprecedented levels of connectivity and
intelligence in future networks [2]–[4]. Moreover, exploit-
ing higher frequency bands in 6G, e.g., millimeter waves
(mmWaves), enables finer sensing resolutions, expanding
ISAC’s potential. This amalgamation propels advancements
in domains such as autonomous systems, smart cities, and
healthcare, revolutionizing the interaction with technology.
The fusion of communication and sensing transcends mere
opportunity, becoming an imperative for harnessing the full
potential of 6G networks.
The design of ISAC technology consists of trading between
sensing and communication performance, leaning towards
one or the other depending on the target application. The
complexity of the tradeoff depends on the level of integration
between the two functionalities [5], stemming from colocation,
where sensing and communication shares partially the hard-
ware, to co-design, where they share the same space-time-
hardware resources. The work herein can be framed within
the communication-centric ISAC framework [1], where we
explore sensing as a secondary function to support commu-
nication for beam management in a multi-vehicular scenario.
Beam management poses significant challenges that hinder
the deployment of 5G new radio (NR) at mmWave frequencies
[6], which becomes even more complex when considering
Vehicle-to-Everything (V2X) applications [7]. Efficient beam
management is critical for maintaining reliable and stable
connections in dynamic environments. Factors such as link
blockages [8] and multi-path propagation create hurdles for
beam alignment, tracking, and handover [9].
Beam management solutions encompass three main clas-
sification methods: blind techniques (e.g., [7], [10]), side
information-based methods (e.g., [11], [12]), and ISAC ap-
proaches (e.g., [3], [4]). Blind solutions use pre-designed beam
training sequences and exploit the statistical properties of
the channel to estimate the optimal beamforming direction
iteratively. However, blind techniques introduce significant
overhead and can be inefficient. Side information techniques
utilize the transmitter and receiver location information for
optimal beamforming direction estimation. While these meth-
ods can be effective, they require a pre-established link for
information sharing.
ISAC approaches have emerged as a promising alternative
that attracted significant attention recently. In the context of
beam management, the authors in [4] introduced radar-aided
beam alignment in mmWave V2I communications exploiting
side information gathered from a radar mounted at the infras-
tructure to select the beams of the communication system.
A deep learning-based beam prediction solution has been
recently introduced in [3], which studies the impact of differ-
ent preprocessed raw radar measurements—i.e., range-angle
maps, range-velocity maps, and radar cube—on the network
predictive capabilities. The proposed method is evaluated on
real-world mmWave radar and communication data acquired
in vehicular environments, showing high accuracy, significant
reduction in beam training overhead, and leading performance
when using range-angle radar maps as conditioning inputs.
To exploit radar sensing for beam management, two key
steps must be addressed: target detection (TD) and target-to-
user (T2U) association. TD involves distinguishing the relevant
targets from the clutter in the received radar image. On
the other hand, the T2U association focuses on determining
arXiv:2401.12801v1 [cs.NI] 11 Jan 2024

剩余14页未读,继续阅读
资源评论



人工智能_SYBH
- 粉丝: 4w+
- 资源: 222









最新资源
- PLC 程序 2号卸垛AD778899.gxw
- C#ASP.NET大学在线考试系统源码数据库 SQL2008源码类型 WebForm
- PLC 程序 2号送盖机123DF456.gxw
- ta-lib-0.5.1-cp311-cp311-win-amd64.whl
- 二车间 PLC 程序2号码垛机.gxw
- Qt QChart+Eigen库 绘制线性回归图表,源代码和库都在压缩包里
- 二车间 PLC 2号包装机.gxw
- onnxruntime-win-x64-gpu-1.19.2.zip
- 一车间4号包装机 GX Works3 PLC项目
- java校园管理平台源码数据库 MySQL源码类型 WebForm
资源上传下载、课程学习等过程中有任何疑问或建议,欢迎提出宝贵意见哦~我们会及时处理!
点击此处反馈


